












Semi Autonomous Driving using road signs and Collision Avoidance - Project
2023
Arizona State University, Mesa, Arizona, United States
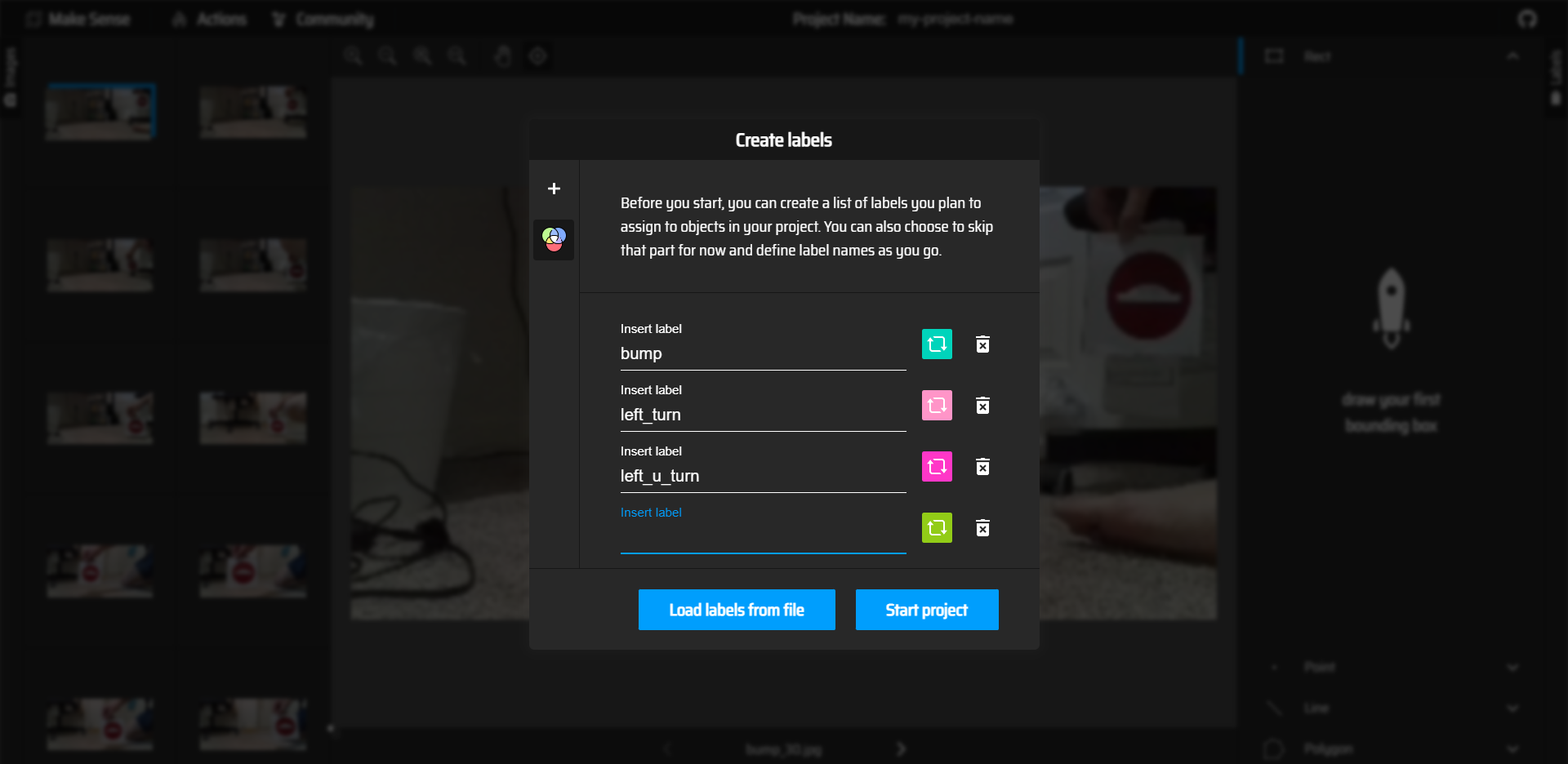
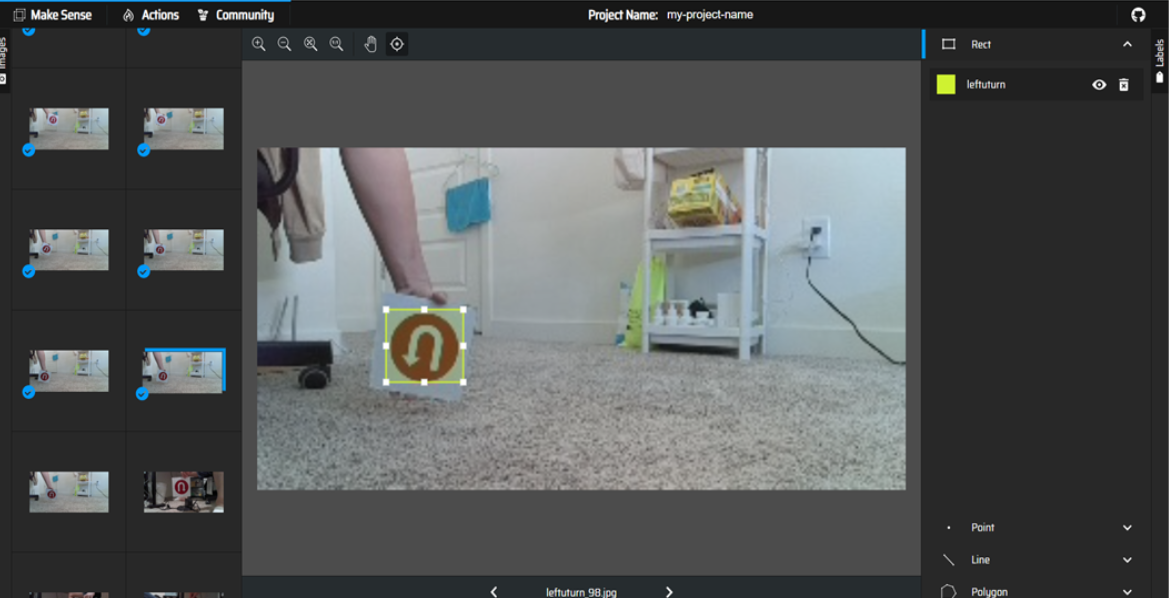
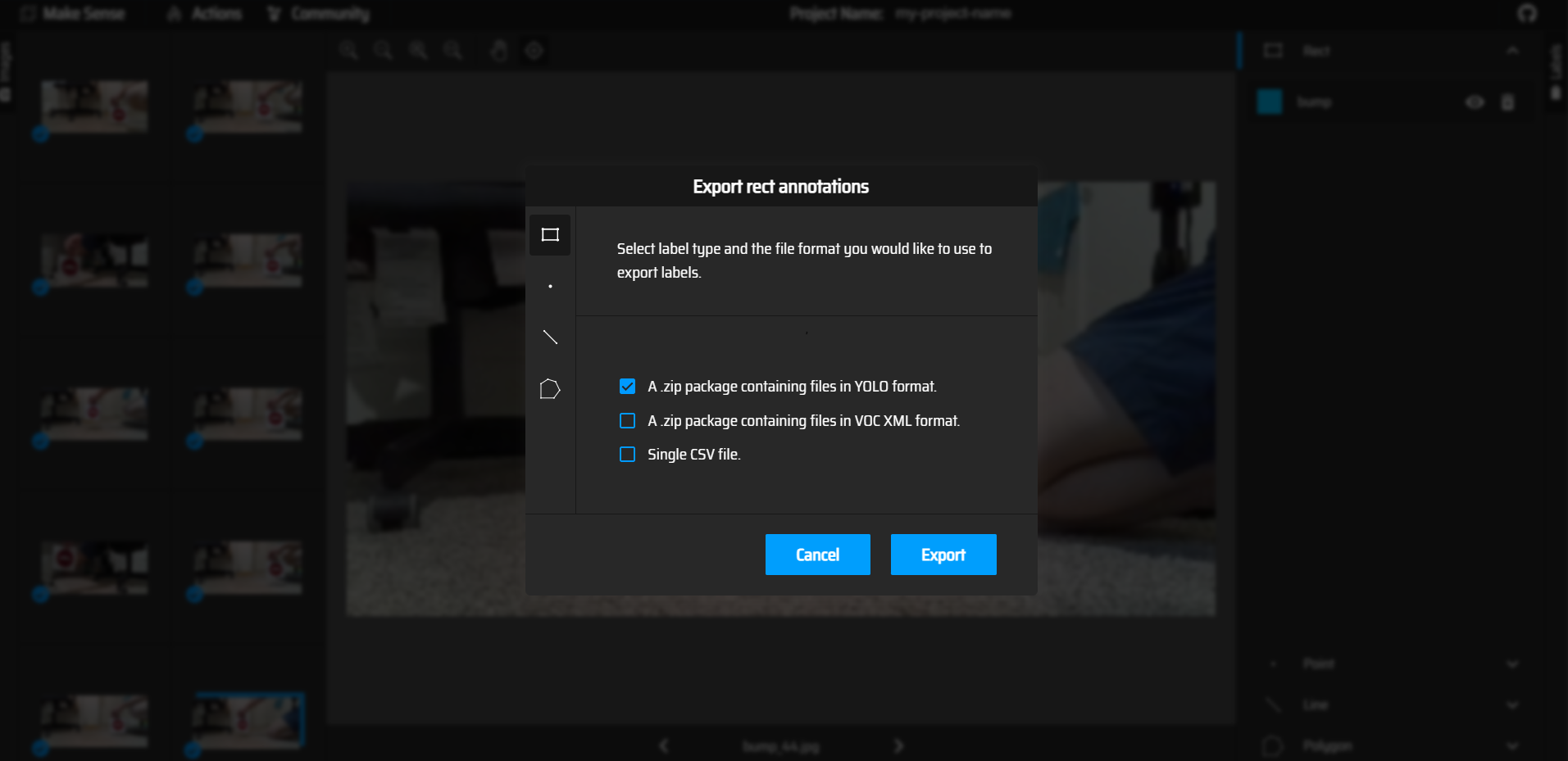
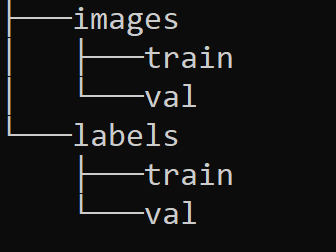
The objective of this project is to develop a semi-autonomous vehicle which can detect different road signals and avoid dynamic obstacles (collision avoidance).
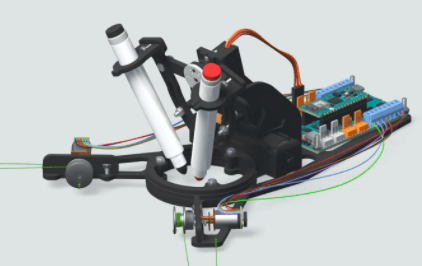
A Real-Time Biofeedback Device for Individuals with Neuro Vocal Intensity Disorder - Project
2023
Barrow Neurological Institute, Phoenix, Arizona, United States
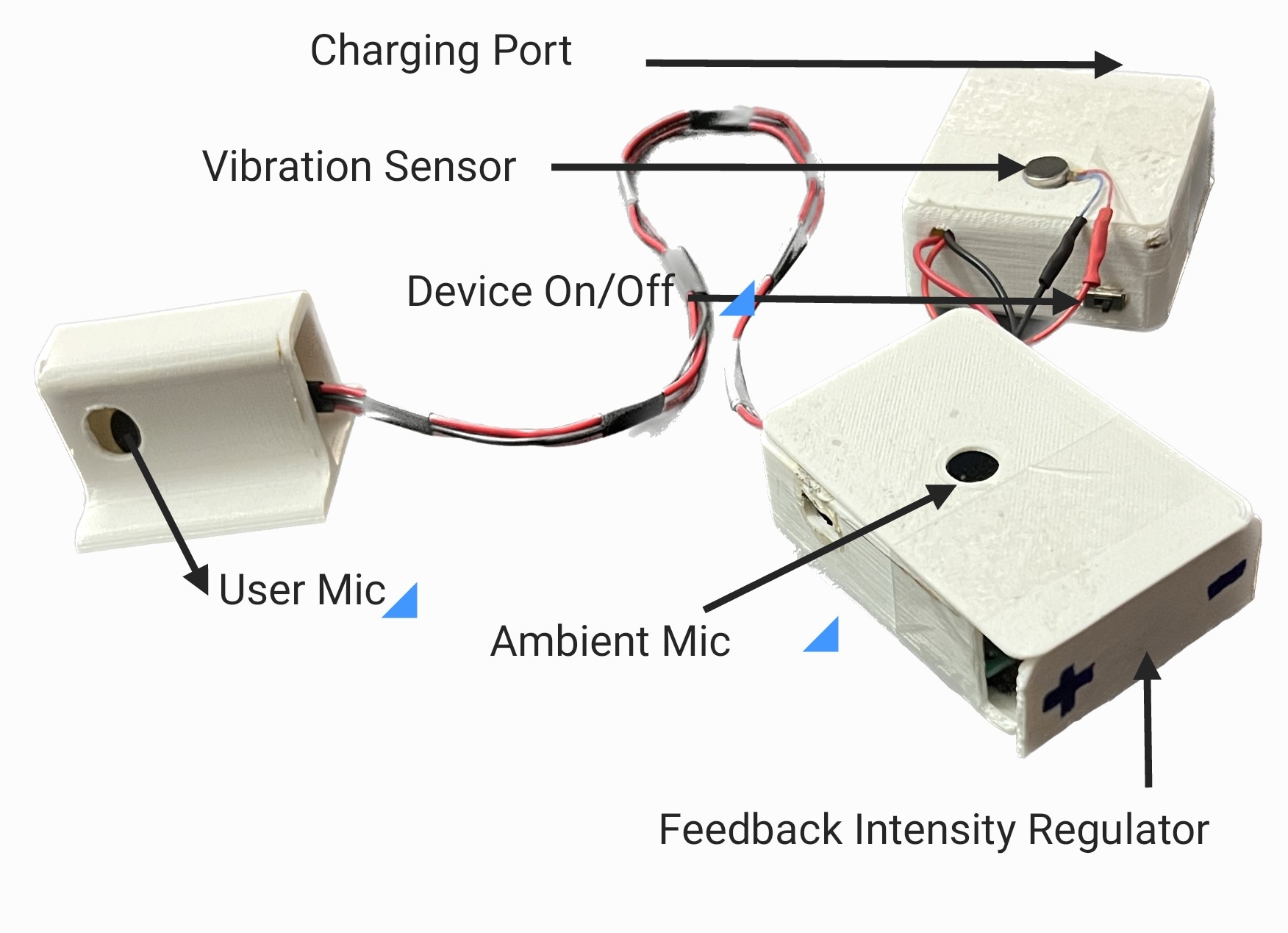
A Biofeedback is developed for patients with parkinsons suffering from lack of vocal intesity awareness.

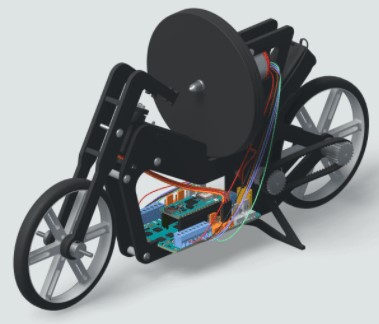
Arduino Engineering Kit - Self Balancing Motorcycle, Webcam Controlled Mobile Rover, Drawing Robot.-Project
2022
Arizona State University, Mesa, Arizona, United States
Programmed using Matlab and Simulink, an academic project for Robotic Systems - I
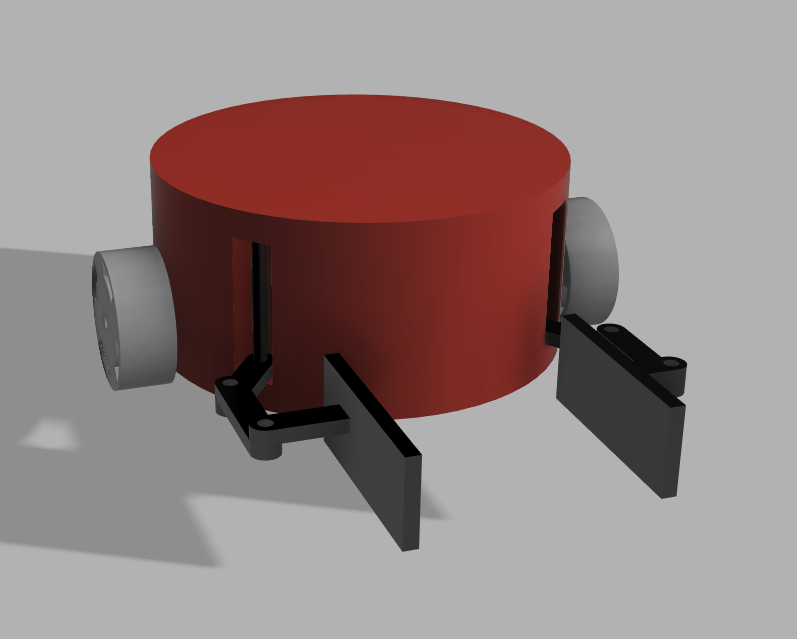
Position Control of a DC Motor with MATLAB using a Raspberry pi
2022
Arizona State University, Mesa, Arizona, United States
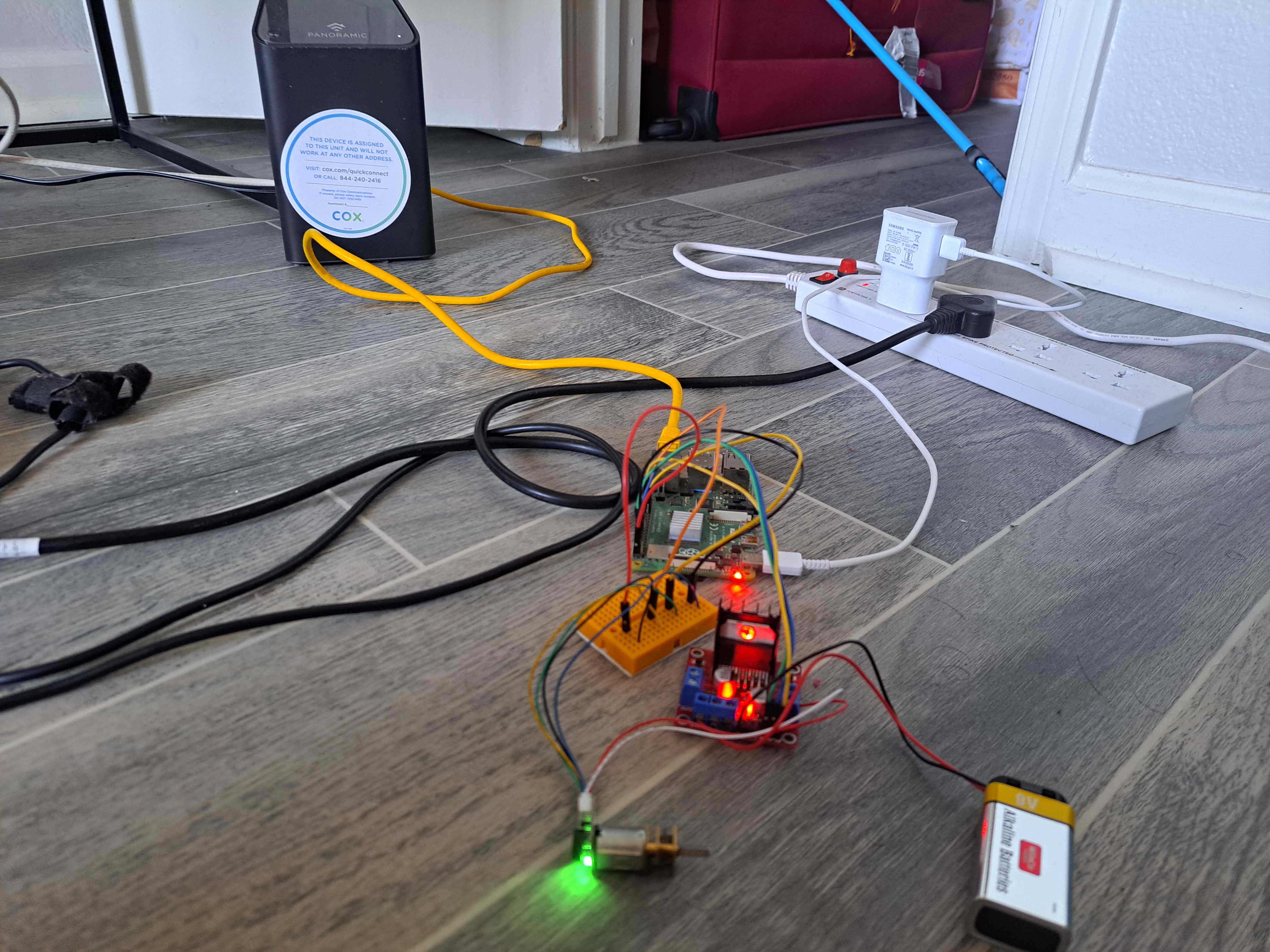
The objective is to develop a closed loop control system for a motor using encoder feedback and control the position of the motor. Academic project for Mechatronics Systems.

Started my journey as an ASU student
2022
Arizona State University, Mesa, Arizona, United States
M.S. Robotics and Autonomous Sytems, Systems Engineer
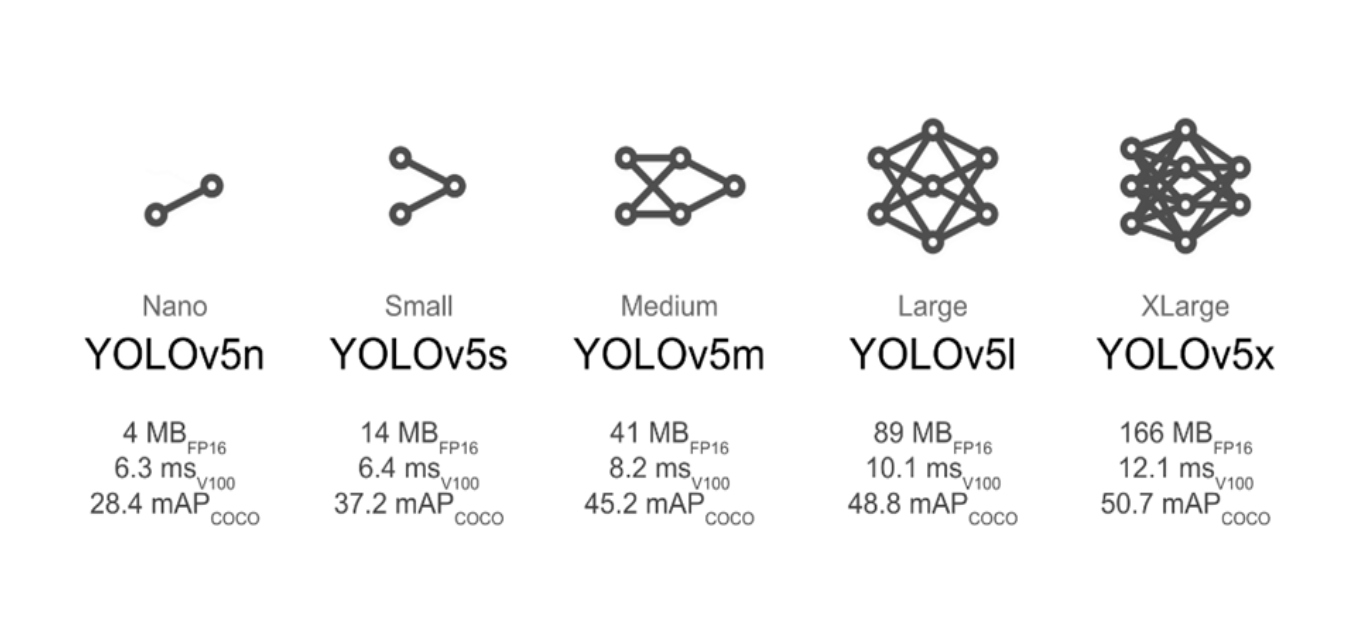
My first publication
2022
Anomalous Human Activity Detection Using Stick Figure and Deep Learning Model - A Deep learning model is developed which takes the stick figure of a human as input and outputs a pose which is either Normal or Anomalous.
LAPP kabel - Intern
2022
LAPP India Pvt Ltd, Bangalore, Karnataka, India
The objective is to develop a mobile robot that traverses overhead cable trays and finds faults in cables using a thermal camera. Worked as a software enginner, developed an appication in python and programmed the Raspberry pi.
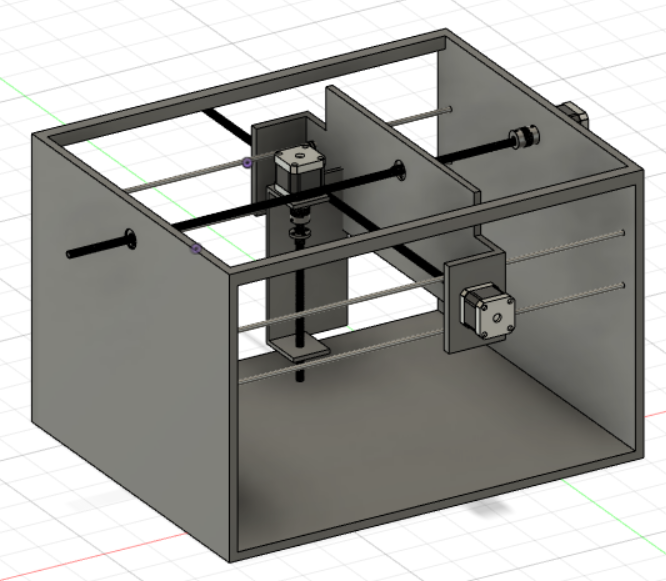
CNC Sketching Machine - Project
2021
PSG College of Technology, Coimbatore, Tamil Nadu, India
Develop a Sketching machine that takes in an image, convert the image to G codes and actuate the motors to draw the image.
My first step
2018
PSG College of Technology, Coimbatore, Tamil Nadu, India
Joined my undergrad as a "Robotics and Automation" student and made my first robot using the LEGO kit.